-
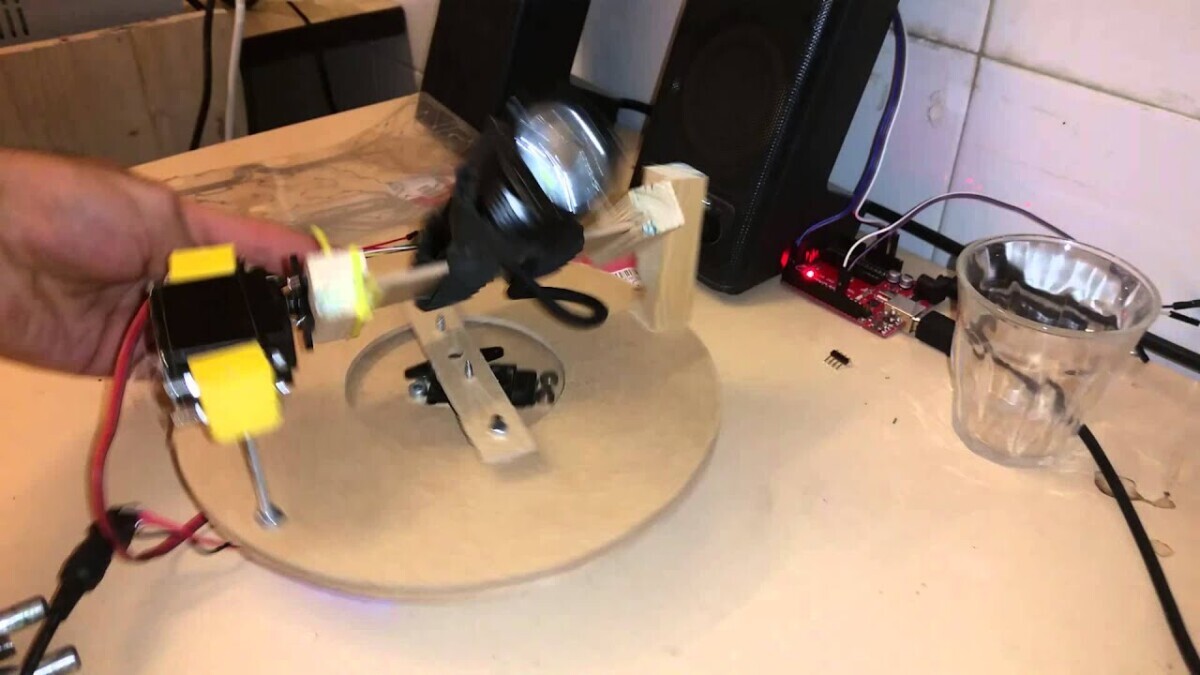
2-axis wash projector
Project with HackENS, the robotics club of ENS.
-
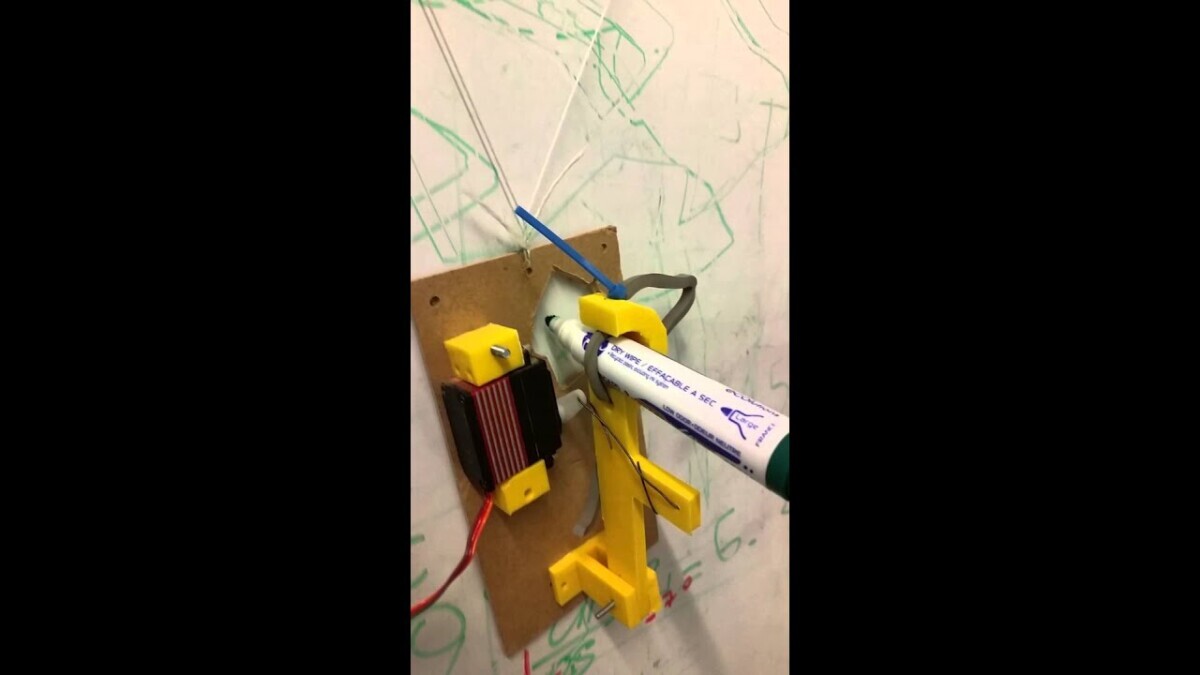
Suspended pen plotter
Unfinished project with HackENS, the robotics club of ENS.
-
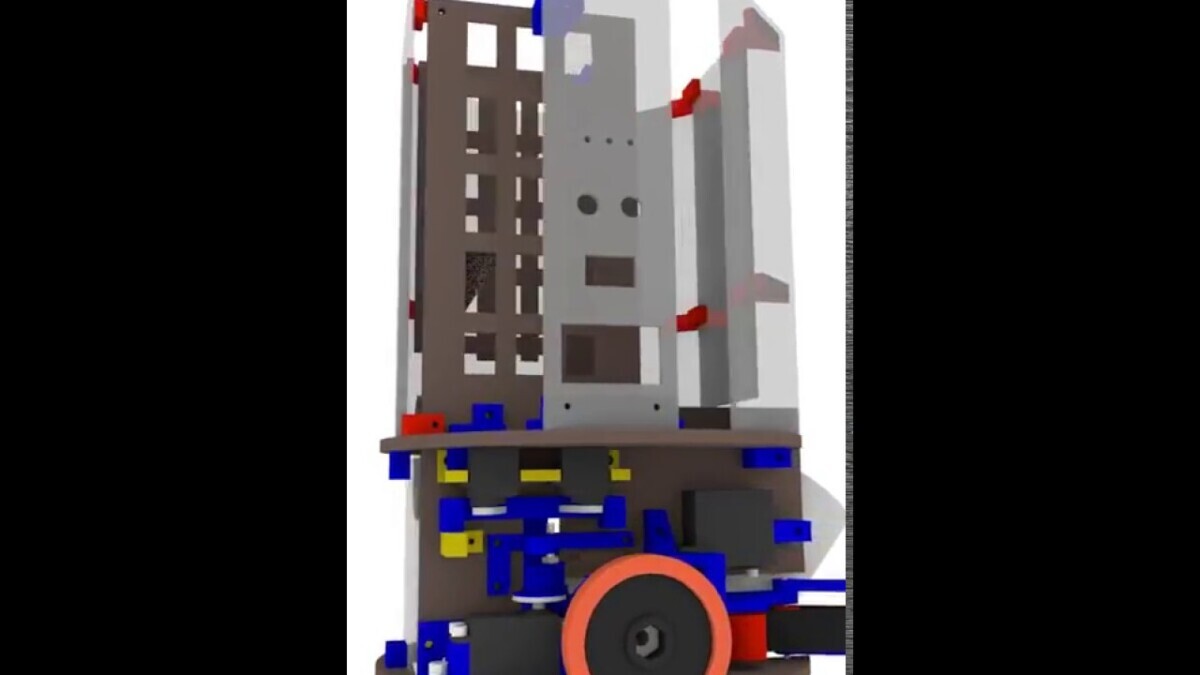
French robotics cup (2017)
Project with HackENS, the robotics club of ENS.

Guillaume Matheron
Data scientist, PhD in computer science